Einsatz moderner Messmethoden in der Bestandsdokumentation
Kombination von inertialer Messtechnik und Laserscanning beim Gleismesssystem GEDO IMS-Scan

Die kontinuierlich zunehmenden Anforderungen an die Gleisvermessung treiben Einführung und Einsatz neuer Technologien voran. Ingenieure, die sich traditionell im Spannungsfeld zwischen Produktivität, Genauigkeit und Arbeitssicherheit befinden, müssen heute Daten mit wesentlich höherem Detaillierungsgrad bis hin zu hochauflösenden Punktwolken mit hoher Genauigkeit in kürzerer Zeit erfassen. Die im Rahmen einer Bestandsaufnahme erfassten Messergebnisse müssen hinsichtlich Präzision und Auflösung sowohl die Anforderungen für die klassische Trassierung als auch die Modellierung entsprechend der BIM-Vorgehensweise (Building Information Modeling, BIM) erfüllen. Da dies auf Basis klassischer Messmethoden nur mit hohem Aufwand zu erreichen ist und es mit auf Fahrzeugen montierten Messsystemen (z.B. Mobile Mapping) weder hinsichtlich Genauigkeiten noch im Einklang mit den geltenden Vorschriften umfassend möglich ist, kommen zunehmend handgeschobene Messsysteme zum Einsatz. Die Kombination von inertialer Messtechnik und Laserscanning spielt hierbei eine große Rolle. Ein solches Messsystem wird nachfolgend am Beispiel des GEDO IMS-Scan-Systems vorgestellt.
Messsystem Trimble GEDO IMS-Scan
Bei dem Gleismesssystem GEDO IMS-Scan handelt es sich um einen handgeschobenen und spurgebundenen Gleismesswagen (GEDO CE 2.0), mit dem schnell und effizient die absolute und relative Gleislage erfasst werden kann (Abb. 1). Der Wagen ist mit inertialer Messtechnik (GEDO IMU) und einem Laserscanner ausgestattet. Bei der IMU (engl.: lnertial Measurement Unit) handelt es sich um ein Multisensorsystem, mit dem die freie Bewegung eines Körpers im Raum erfasst und damit die zurückgelegte Trajektorie beschrieben werden kann. In einem Arbeitsschritt werden Spurweite, Überhöhung, Verwindung, Krümmung und Längsneigung des Gleises ermittelt und über ein Wegmessrad (Odometer) miteinander synchronisiert und verortet. In Verbindung mit dem Laserscanner werden zusätzlich sämtliche Objekte im nahen Umfeld des Gleises erfasst und in Form von 3DPunktwolken repräsentiert.
Der Gleismesswagen wird nach dem Einsetzen in das Gleis über einen Gasdruckdämpfer auf der Seite des Odometers im Gleis angepresst und auf der gegenüberliegenden Seite über zwei Punkte immer senkrecht entlang des Schienenverlaufs ausgerichtet. Kugellager gewährleisten eine präzise Referenz zur Schieneninnenkante und sorgen für einen nahezu reibungsfreien Ablauf entlang der Schienen. Der Gleismesswagen GEDO CE 2.0 erfüllt die Anforderungen entsprechend EN 13977 an Rollwagen für den Bau und die Instandhaltung. Der auf dem System eingesetzte Laserscanner vom Typ TX8 wird im sogenannten Helical Modus betrieben, in dem der Scannerspiegel nur in seiner Vertikalebene rotiert. Erst durch die Vorwärtsbewegung des Gleismesswagens entsteht eine dreidimensionale Punktwolke entlang der Gleisachse, die über das Wegmessrad mit den anderen Sensordaten synchronisiert wird. Der Scanner ermöglicht eine maximale Scangeschwindigkeit von 1 Mio. Punkten pro Sekunde. Abhängig von der gewünschten Auflösung in Arbeitsrichtung ergibt sich die Schubgeschwindigkeit, z.B. 0,6 m/s für eine sehr dichte Punktwolke. Zur Sicherstellung der bestmöglichen Genauigkeit ist die Scannerebene rechtwinklig zur Gleisachse ausgerichtet. Es ist aber möglich, den Scanner bei entsprechender Kalibrierung des Systems zu verdrehen, um senkrecht zur Gleisachse stehende schmale Objekte (z.B. Schilder) besser erkennen zu können. In der Praxis hat sich eine Verdrehung im Bereich von 10° bis 20° bewährt.
Die Messwerterfassung erfolgt mit einem außendiensttauglichen Feldrechner (z.B. Trimble TSC7) in Verbindung mit der Software GEDO IMS. Die weitere Auswertung der Daten wird mit der Software GEDO Scan Office durchgeführt.
Messablauf und Datenprozessierung
Zur Inbetriebnahme erfolgt zunächst eine 5-minütige Initialisierung, während der die IMU Informationen zur Erdrotation und Nordausrichtung erfasst. Während dieser Zeit muss der Wagen nicht zwingend bereits im Gleis positioniert sein. Anschließend ist das System einsatzbereit und der Wagen kann in das Gleis gesetzt werden. Das Systemgewicht liegt unter 40 kg, was den Transport durch lediglich zwei Personen erlaubt. Die eigentliche Bedienung erfolgt durch eine Person. Während der Messung werden auf dem Bildschirm die zurückgelegte Wegstrecke sowie Gleisparameter wie Spurweite, Überhöhung und Verwindung angezeigt. Über ein Ampelsystem wird die aktuelle Geschwindigkeit kontrolliert, um die gewünschte Auflösung in Stationsrichtung sicherzustellen. Parallel kann auch eine LiveAnsicht der Laserscandaten erfolgen. Hier werden die Scanpunkte in Querprofilansicht mit Bezug zu einem wählbaren Lichtraumprofil farblich dargestellt. So erkennt man bereits im Feld, ob sich ein Objekt eventuell zu nah am Gleis befinden könnte und auf jeden Fall erfasst werden muss.
Muss die Messung unterbrochen werden, weil z.B. eine Zugfahrt angekündigt wird oder sich ein Hindernis im Gleis befindet, kann der Scan pausiert und das System nach vorherigem Markieren der letzten Position sofort (Räumzeit ca. 10 Sekunden) aus dem Gleis gehoben werden. Nach Ende der Pause wird der Wagen wieder an derselben Stelle in das Gleis gesetzt und die Messung kann fortgesetzt werden. Müssen Hindernisse wie Gleisschaltmittel oder Weichen überbrückt werden, kann der Scan auch hinter dem Hindernis unter Angabe der Länge der Lücke fortgesetzt werden. Sollten sich in dem Bereich potenziell zu scannende Objekte befinden, kann von der letzten Wagenposition ein statischer 180°-Scan der vorausliegenden Umgebung durchgeführt und auf diese Weise die Lücke gefüllt werden. Die Punkte werden automatisch in die Punktwolke integriert. Zur Herstellung des Bezugs zur örtlichen Gleisvermarkung und damit zum Referenzkoordinatensystem (z. B. DB-REF) werden die Festpunkte (GVP) im Feld durch Passmarken mit Schachbrettmuster signalisiert.
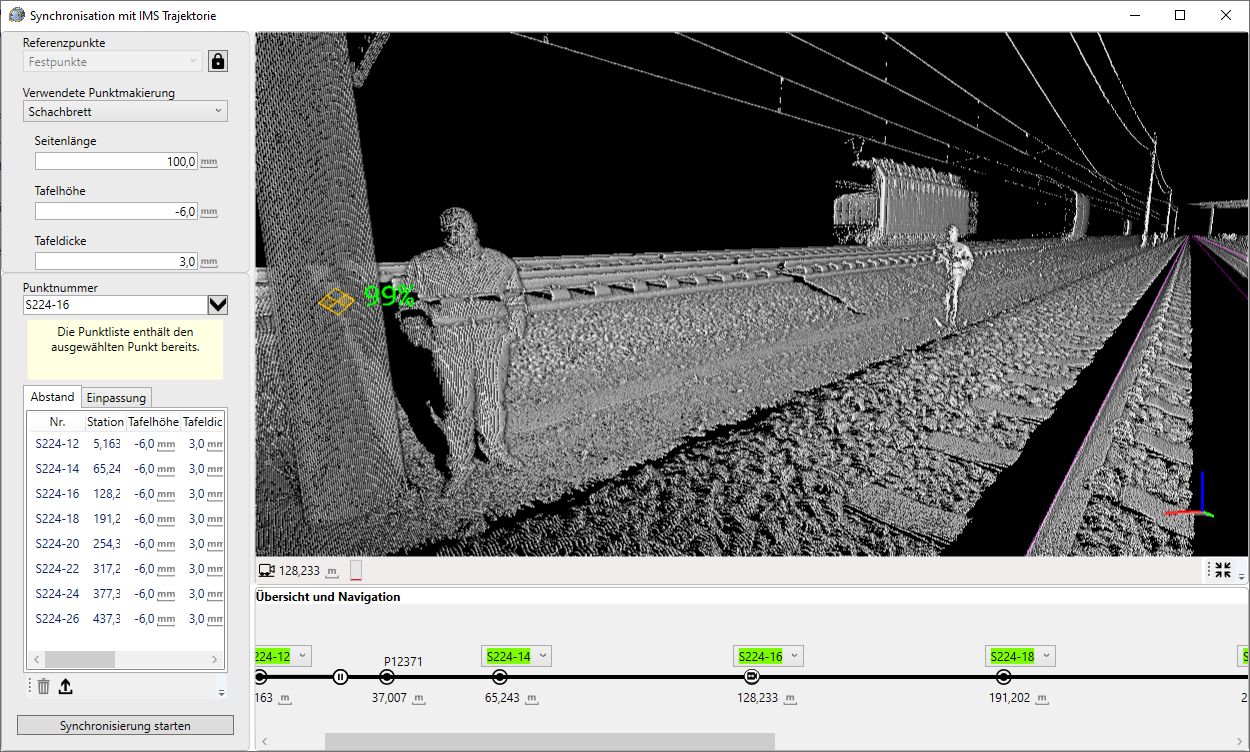
Die Marke wird entweder direkt am Gleisvermarkungsbolzen angebracht oder es wird mit einem speziellen Lotstab ein Bodenpunkt signalisiert.
Im ersten Auswertungsschritt muss der Bediener die Passmarken aus der Punktwolke dem jeweiligen Festpunkt zuordnen. Das Zentrum der Marke wird automatisch erkannt, wenn ein beliebiger Punkt auf der Marke vom Benutzer angeklickt wurde. Sobald zwei Marken registriert wurden, erfolgt die Positionierung der Kamera bei den nächsten Passmarken automatisch, da die Positionen im Scan über die Koordinaten der Referenzpunkte bereits näherungsweise bekannt sind. Auf Basis dieser Koordinaten erfolgen die Einpassung der Trajektorie und eine erneute Synchronisation der Laserscandaten. Damit erhält jeder Punkt in der Punktwolke kartesische Koordinaten im Bezugssystem.
Ergebnis der Prozessierung der Messungen mit der Software GEDO Scan Office sind eine Trajektorie mit Informationen über Spurweite und Überhöhung, die die Gleislage repräsentiert, sowie eine hochauflösende dreidimensionale Punktwolke. Diese Daten dienen in der Folge als Grundlage für die Trassierung und Modellierung.
Auswertung und Analyse
Aufgrund fehlender Gleissperrung ist eine klassische Bestandsaufnahme oftmals nicht mehr möglich. Daher gewinnen Methoden zur Bestimmung der Gleislage ohne Betreten des Gleises zunehmend an Bedeutung. Die mit dem GEDO IMS-Scan-System erfasste hochauflösende und genaue Punktwolke ermöglicht die Bestimmung der Lage des Nachbargleises rein aus der Punktwolke. Hierzu werden die Schienen des Nachbargleises auf Basis eines ausgewählten Schienenprofils automatisch erkannt und hieraus eine Gleistrajektorie berechnet. Danach können sämtliche Auswerteschritte in Bezug zu dieser Ist-Gleislage vorgenommen werden.
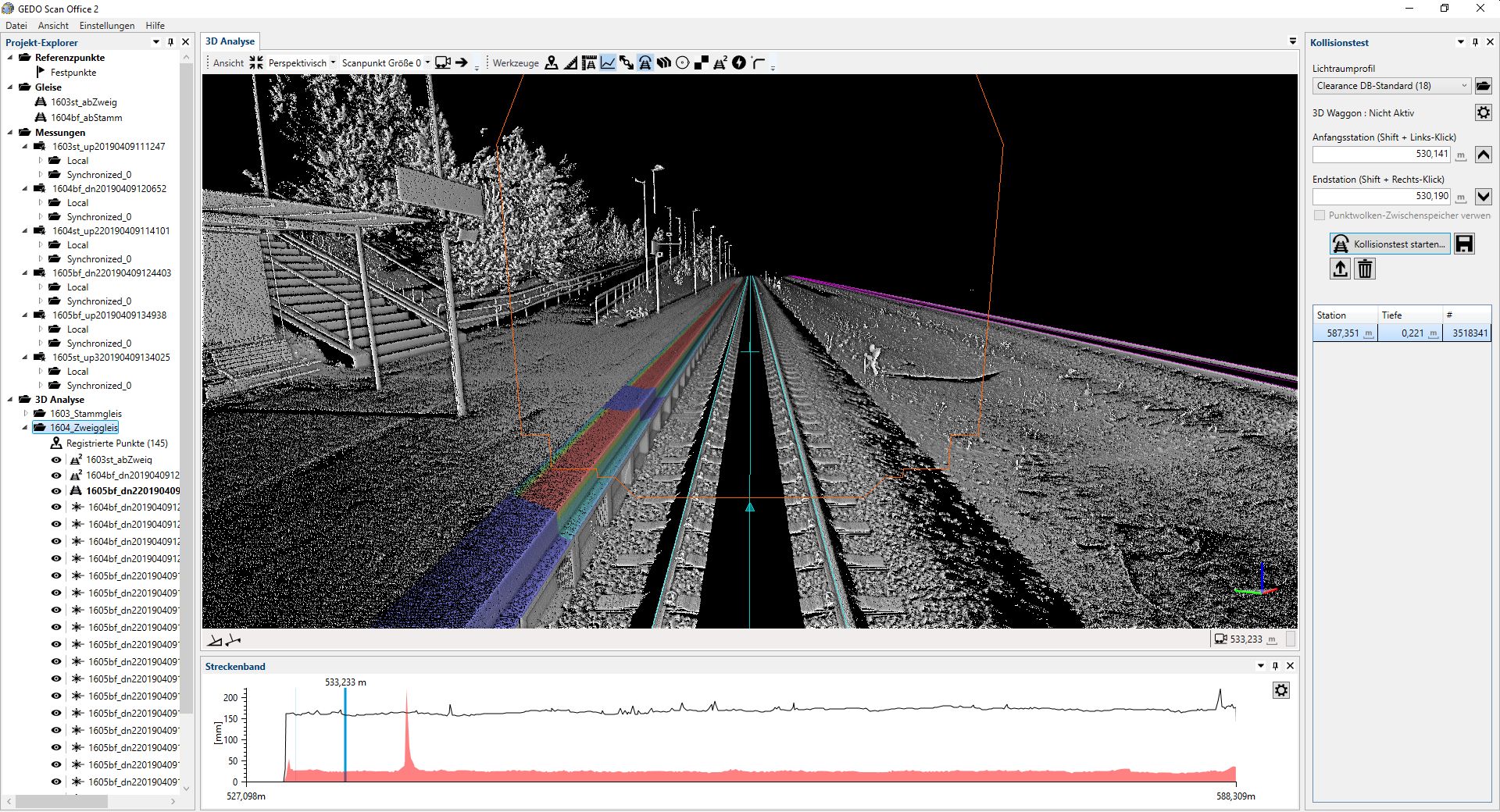
Für die Trassierung können Abstandsinformationen zwischen Objekten und der aktuellen Gleislage sowie einer geplanten Trasse direkt aus der Punktwolke abgegriffen werden. Einzelne Punkte werden codiert und gespeichert. Neben der manuellen Messung ermöglichen die gewonnenen Daten auch eine automatische Kollisionsprüfung. Bei dieser wird ein starres oder dynamisches Profil entlang der Trajektorie durch die Punktwolke geschoben und Einragungen farblich gekennzeichnet [1]. Dynamische Profile können durch Vorgabe von Wagenabmessungen oder Formelsätze (z. B. für BVG, SBB etc.) erzeugt werden. Die Daten sind ebenso Grundlage für die Engstellendokumentation [2] im Rahmen der Lichtraumdatenbank (LIRA) der Deutsche Bahn AG (DB AG).
Zur Kontrolle der Abstandsmaße entlang von Bahnsteigen kann die Bahnsteigvorderkante über eine Konturverfolgung bestimmt und als 3D-Polylinie dargestellt und gespeichert werden. Zusätzlich liefert das Ergebnis eines Kollisionstests entlang des Bahnsteiges Informationen über den Bereich des kürzesten Abstandes.
Da im Rahmen der Messung fast die gesamte gleisnahe Umgebung erfasst wird, kann auf Basis der Daten auch die Position der Oberleitung bestimmt werden. Eine entsprechende Funktion der Auswertesoftware detektiert diese, erzeugt eine Polylinie und berechnet die Lage und Höhe im überhöhten System in Bezug zur Gleisachse.
Eine wichtige Aufgabe bei den aktuellen Projekten der DB Station&Service ist die Modellierung des Ist-Bestands als Ausgangssituation der Planung.

Als Grundlage der Modellierung werden oftmals Laserscandaten von terrestrischen Scans verwendet. Aufgrund der hohen Genauigkeit können hierzu auch die Ergebnisse des GEDO IMS-Scan-Systems verwendet werden. Die Übergabe an die entsprechende Software zur Modellierung erfolgt im LAS- oder LAZ-Format.
Genauigkeitsbetrachtung
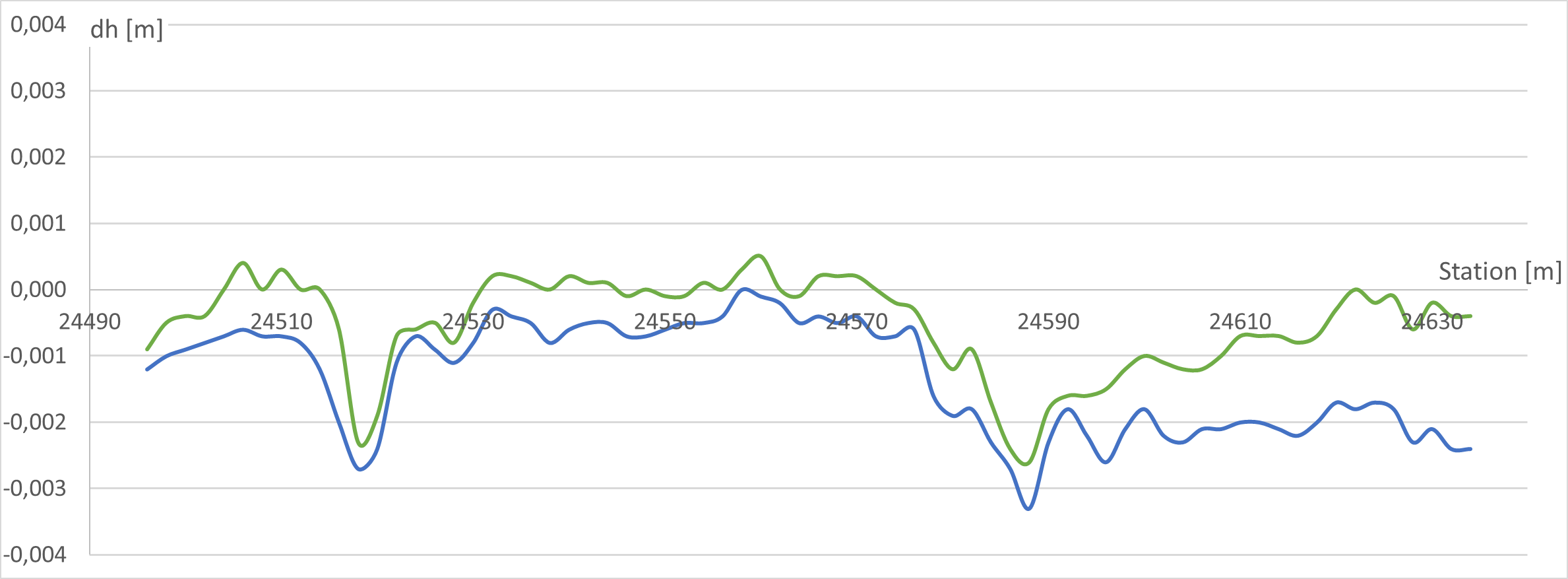
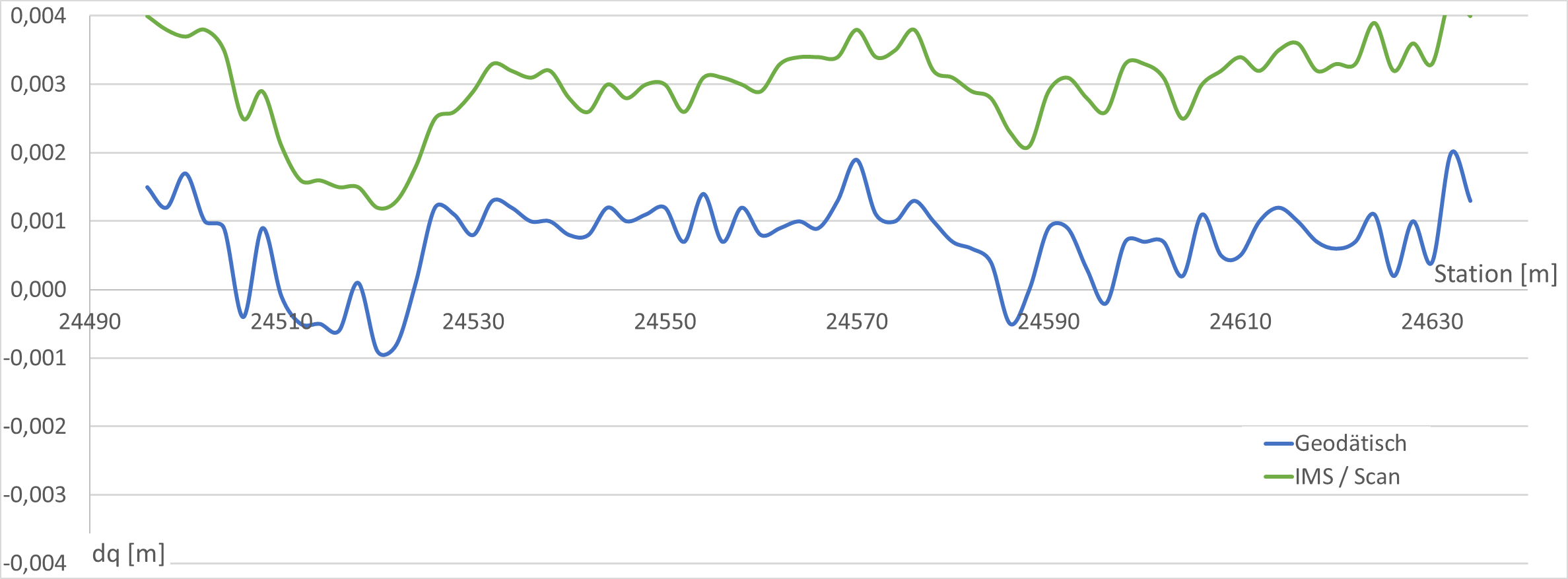
Die Analyse der Genauigkeit eines Multisensor-Systems ist aufgrund der komplexen Abhängigkeiten der einzelnen Sensoren untereinander sehr schwierig. Die theoretische Betrachtung in Form einer Fehlerfortpflanzung ist nur bei starker Verallgemeinerung durchführbar. Daher sind praxisorientierte Vergleiche mit anderen Messmethoden zielführender. Im Folgenden wird eine Abschätzung der mit dem System erreichbaren Genauigkeiten durch den Vergleich mit Messdaten präsentiert, die im Rahmen einer hochgenauen geodätischen Kontrollvermessung nach der Einrichtung der festen Fahrbahn in einem Tunnel gesammelt wurden.
Bei der Betrachtung der Genauigkeit muss zwischen relativer und absoluter Genauigkeit unterschieden werden. Für die relative Genauigkeit sind Form und Stetigkeit der resultierenden Gleislage ausschlaggebend, für die absolute Gleislage jeweils auch die Position des Gleises in Bezug zu einer Referenz. Die relative Genauigkeit wird bei dem System rein durch die Genauigkeit der IMU-Messung und zu einem sehr kleinen Anteil durch die Genauigkeit der Spurweitenmessung (+/- 0,3 mm) abgebildet. Die IMU ist in der Lage, die Gleislage über einen gewissen Bereich in Lage, Höhe und Überhöhung hochgenau zu erfassen. Mit fortschreitender Dauer nimmt die Sensordrift immer weiter zu, was aber für eine rein relative Betrachtung in einem im Gleisbau üblichen Auswertebereich (z.B. Wandersehne) keine Rolle spielt. Bei typischen Sehnenlängen sind Genauigkeiten < 1 mm nachweisbar. Für eine absolute Genauigkeitsbetrachtung müssen zusätzliche Messungen zu Festpunkten eingeführt werden, mit denen die lokale Trajektorie in ein globales Bezugssystem überführt wird. Beim Gleismesssystem GEDO IMS-Scan werden dafür die Festpunkte mit 1 O cm großen quadratischen Passmarken versehen. Während der Auswertung werden durch die Betrachtung aller Scanpunkte auf der Marke eine ausgleichende Ebene und der Mittelpunkt des Quadrats bestimmt. Durch die große Redundanz kann das Zentrum sehr viel genauer ermittelt werden als durch eine einzelne Beobachtung. Bei der typischen Entfernung zur Zielmarke liegt die Genauigkeit für die Festpunktmessung unter Berücksichtigung aller Fehlereinflüsse bei +/- 3 mm.
Bei der Betrachtung der absoluten Genauigkeit hat zusätzlich das Odometer (Wegmessrad) einen Einfluss. Durch Maßstabsänderungen (z.B. durch Temperatur) und Schlupf ergeben sich nach internen Korrekturen Abweichungen von 10-20 mm zwischen zwei Festpunkten mit 100 m Abstand. Das ist für die Betrachtung der seitlichen Abweichungen oder der Höhe über SO nicht weiter relevant. Anstelle eines Koordinatenvergleichs von Objektpunkten wird daher die Klassifizierung der Genauigkeit in Längs- und Querrichtung getrennt durchgeführt.
Nach gegenwärtiger Auffassung der Ril 883.3100 ist für die Weichenhauptpunkte eine Genauigkeit von 5 mm auch in Längsrichtung gefordert. Diese Genauigkeit kann mit dem System zwar relativ in Lage und Höhe, aber nicht in Stationsrichtung erreicht werden. Daher muss die Bestandsaufnahme in diesen Bereichen durch klassisch geodätische Messungen ergänzt werden. Da es sich bei dem System nicht um ein klassisch geodätisches Messmittel handelt, können zudem die üblichen Methoden zur Genauigkeitsbetrachtung und Nachweise zur Einhaltung entsprechend Ril 883.3100 nicht angewendet werden. Auf Basis vorliegender Erfahrungsberichte und Testmessungen hinsichtlich der erreichbaren Genauigkeit in der Praxis wird der Einsatz von der DB AG aber unterstützt. Hierzu müssen für die Projekte entsprechende Messkonzepte erstellt und insbesondere Themen wie Qualitätskontrollen im Feld ausreichend berücksichtigt werden. Entsprechende Maßnahmen ermöglichen später im Büro oder bei der Beurteilung durch den Prüfingenieur Aussagen über die Einhaltung des Messkonzeptes und die Qualität der Messung. Die erreichbare Genauigkeit und die Einsetzbarkeit für die Lichtraummessung wurde bereits in [2] untersucht und nachgewiesen.
Zur Bestimmung der Position des Nachbargleises wird ein vorgegebenes Schienenprofil (z.B. UIC60) in den Scan eingepasst und daraus die Gleislage abgeleitet. Die hohe Anzahl an Scanpunkten ermöglicht eine sehr präzise Positionierung.
Die Erfassung der Lage des Nachbargleises erfolgt mit ca. 3 mm (1 o) Genauigkeit auf Basis des befahrenen Gleises. Dies konnte bei der Betrachtung des parallel laufenden Gleises aus dem oben angeführten Projekt im Rahmen der Untersuchung zur absoluten Gleislage bestätigt werden.
Zusammenfassung und Ausblick
Handgeschobene Messsysteme wie das GEDO IMS-Scan, die inertiale Messtechnik und Laserscanning kombinieren, ermöglichen eine vollumfängliche Gleisaufnahme sowie der gleisnahen Umgebung in einem Arbeitsschritt. Die erzielbaren Genauigkeiten sind in weiten Bereichen denen einer klassisch geodätischen Aufnahme gleichzusetzen und müssen nur sehr vereinzelt und für konkrete Anwendungen ergänzt werden. Mit den Messsystemen können die Produktivität und der Detaillierungsgrad der Vermessung deutlich erhöht werden. Durch Anpassung der aktuell geltenden Vorschriften könnten die Rahmenbedingungen für den Einsatz vereinfacht werden. Zusätzliche Anwendungsbereiche wie die BIM-gerechte Schlussdokumentation mit Modellvergleich nach Abschluss der Baumaßnahmen eröffnen für die Zukunft weiteres Potenzial.
Autoren
Dipl.-Ing. Kai Naumann
Trimble Railway GmbH, Wiesentheid
Dipl.-Ing. Andreas Sinning
Trimble Railway GmbH, Wiesentheid
Quellen
[1] Allemann, J.: Mobile Gleisvermessung für ein gleisgeometrisches Projekt, EI - DER EISENBAHNINGENIEUR Heft 9/2017
[2] Herzbruch, F.; Sinning, A.: Lichtraumvermessung mit mobilem Scan-System, EI - DER EISENBAHNINGENIEUR Heft 10/2013
[Abb. 4] GI Consult
![]()
About the Author

Trimble bietet als Marktführer im Bereich Positionierungslösungen für Bau und Vermessung jede Menge Erfahrung und eine umfangreiche Produktpalette für Aufgaben im Gleisumfeld. Die angebotenen Lösungen reichen von Software zur Erstellung von Machbarkeitsstudien und Routenfindung über Systeme zur Bestandsaufnahme bis hin zu Systemlösungen zur Maschinensteuerung und Gleisvermessung für Bau und Unterhalt.